The Robot Laser Welding System combines cutting-edge laser welding technology with advanced robotics for exceptional welding performance. Built with a domestic robot and advanced laser welding processes, this system offers high welding efficiency and remarkable stability throughout the welding process.
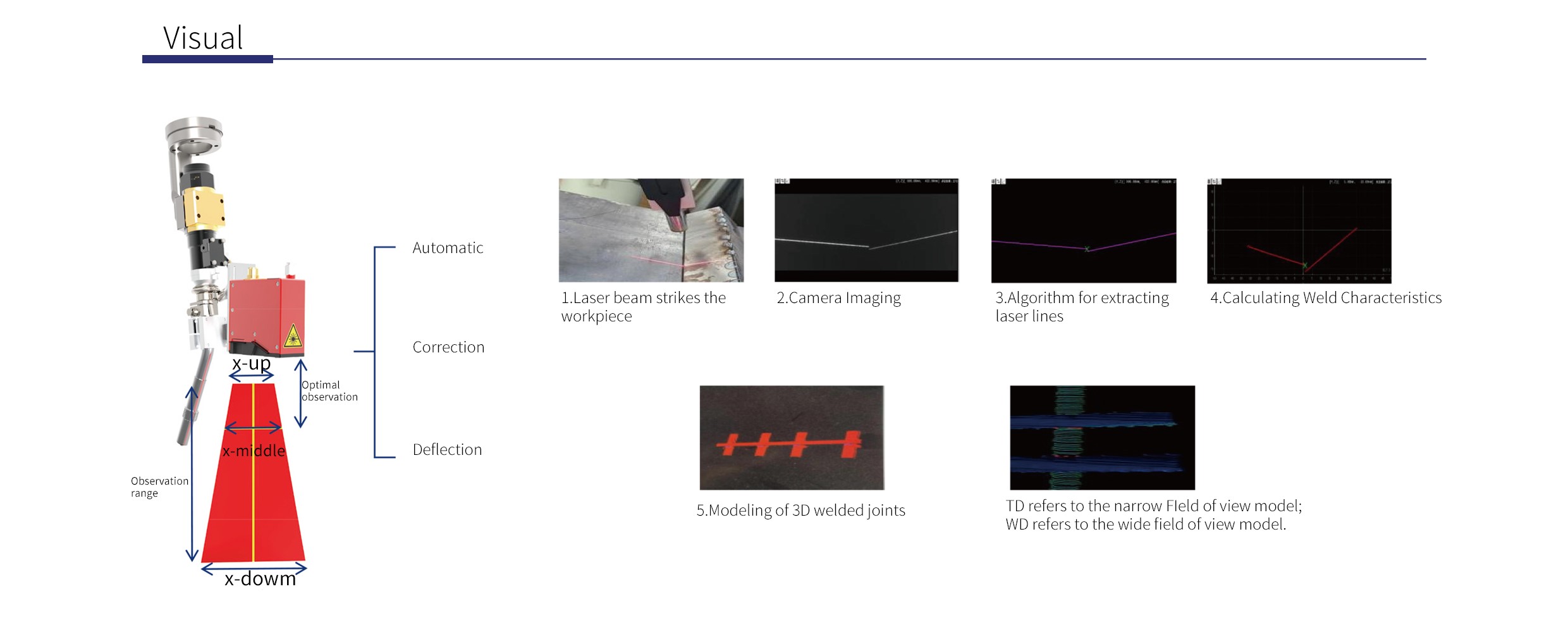
Equipped with an infrared laser weld-tracking sensor, the system uses a high-definition camera to capture and analyze the weld surface. By processing the laser band projected onto the weld, the sensor generates precise, three-dimensional information, including the weld head coordinates, misalignment, and gap dimensions. This data is then transmitted to the robot controller, which calculates the optimal trajectory and process parameters in real time. As a result, the robot can precisely adjust for deviations, achieving an accurate and flawless weld every time.
Compared to traditional methods, laser seam tracking offers significant advantages: non-contact operation, high precision, high speed, and excellent adaptability for various applications.
|
Specification
|
FV-240-TD |
| Volume |
91 x 73 x 41 mm |
| Optimal Observation Distance |
210 mm |
| Depth of Field Distance |
200-300 mm |
| Vertical Resolution |
0.1 - 0.16 mm |
| Minimum Recognizable Height |
0.8 mm |
| Field of View Width |
47 - 103 mm |
| Horizontal Resolution |
0.03 - 0.04 mm |
| Recognizable Minimum Width |
0.5 mm |
| Detection Frequency |
Standard 30 Hz |
| Model |
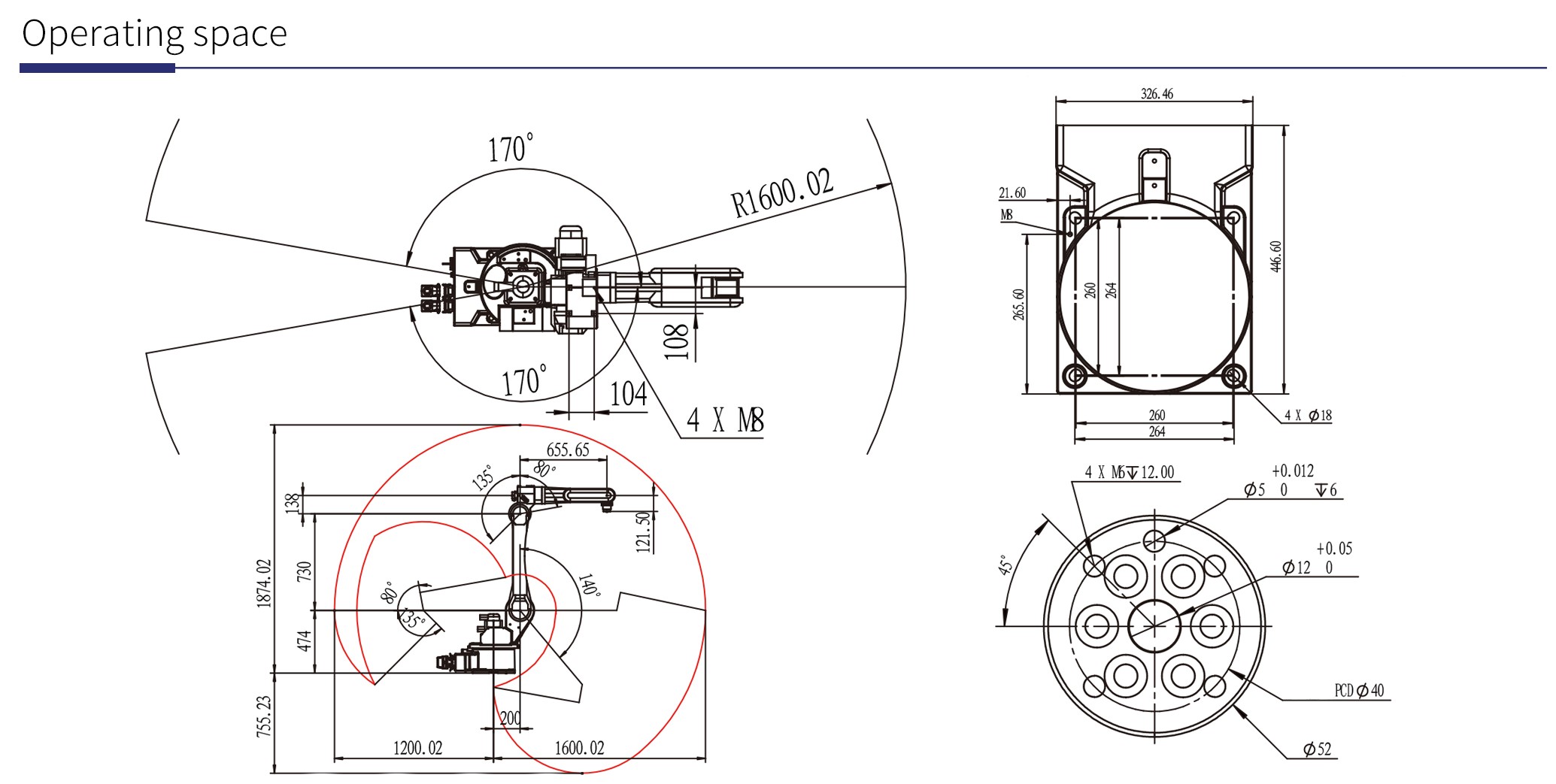
R-1400 |
R-1700 |
R-2000 |
| Number of Axes |
6 axes |
| Maximum Movement Radius |
1601 mm |
1805 mm |
2028 mm |
| Repeat Positioning Accuracy |
±0.05 mm |
| Wrist Load Rating |
10 kg |
20 kg |
10 kg |
| Applicable Ambience Temperature: |
0~40℃ |
| Applicable Ambience Humidity: |
Below 75% RH (short-time 90% RH) |
| Movement Acceleration |
4.9 m/s² |
| Noise Level |
<80 dB(A) |
| Protection Level |
Body IP54, Wrist IP54 |
| Body Weight |
214 kg |
263.4 kg |
288 kg |
| Installation Method |
Flip mounting (customized), formal mounting, side mounting |
| R-1400 |
J1 Axis |
J2 Axis |
J3 Axis |
J4 Axis |
J5 Axis |
J6 Axis |
| Movement Speed |
163°/s |
111°/s |
148°/s |
222°/s |
356°/s |
354°/s |
| Range of Motion |
±170° |
-93°~+80° |
-135°~+85° |
±180° |
-105°~+130° |
±350° |
| Allowable Wrist Torque |
/ |
/ |
/ |
219 N·m |
219 N·m |
130 N·m |
| Maximum Allowable Inertia of the Wrist |
/ |
/ |
/ |
15 kg·m² |
15 kg·m² |
9 kg·m² |
| R-1700 |
J1 Axis |
J2 Axis |
J3 Axis |
J4 Axis |
J5 Axis |
J6 Axis |
| Movement Speed |
158°/s |
108°/s |
142°/s |
180°/s |
258°/s |
350°/s |
| Range of Motion |
±170° |
-100°~+150° |
-162°~+85° |
±180° |
±130° |
±350° |
| Allowable Wrist Torque |
- |
- |
- |
35.5 N·m |
35.5 N·m |
26 N·m |
| Maximum Allowable Inertia of the Wrist |
- |
- |
- |
1.16 kg·m² |
1.16 kg·m² |
0.52 kg·m² |
| R-2000 |
J1 Axis |
J2 Axis |
J3 Axis |
J4 Axis |
J5 Axis |
J6 Axis |
| Movement Speed |
158°/s |
108°/s |
142°/s |
180°/s |
258°/s |
350°/s |
| Range of Motion |
±170° |
-100°~+150° |
-135°~+85° |
±180° |
±130° |
±350° |
| Allowable Wrist Torque |
- |
- |
- |
20 N·m |
20 N·m |
10.47 N·m |
| Maximum Allowable Inertia of the Wrist |
- |
- |
- |
0.28 kg·m² |
0.28 kg·m² |
0.096 kg·m² |